 × 改善前の問題 ×
× 改善前の問題 ×
× 接触式の位置検出センサを使用していたため、頻繁に交換の手間が生じていた
× 交換品の購入やメンテナンスコストがかかっていた
 〇 改善後の効果 〇
〇 改善後の効果 〇
〇 非接触の位置検出センサを使用したことで、摩耗がなくなり、センサが長持ちした
〇 交換作業が激減し、手間もコストも削減することができた
■ 改善方法 ■
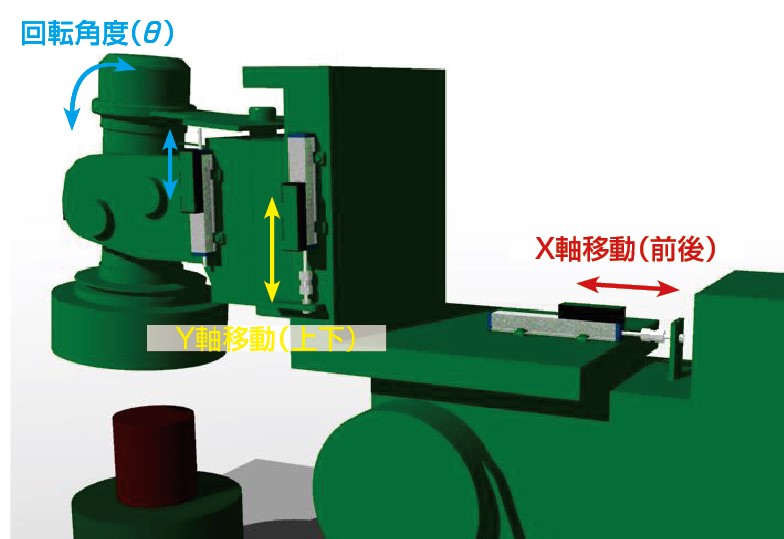
窯業ロボットに非接触タイプの位置検出センサを3本設置。
X軸移動(前後)、Y軸移動(上下)、回転角度(シータ)を同時に確認。
3か所の値を高精度かつ正確に取得し、完成度の高い製品を量産することが可能となった。
■ 動画でご紹介 ■